Log In
튜토리얼
문서
태스크 라이터 응용: 중지, 정지, 종료 명령어 소개
기초
30 분
이 과정에서는 태스크 라이터를 사용하여 작업을 중지/정지하고 프로그램을 종료하는 방법을 소개합니다.
1. 시작하기
두산 로봇에서는 태스크 라이터를 사용하여 일정시간 작업 대기, 실행중인 태스크를 일시 중지 및 정지 그리고 프로그램을 종료할 수 있습니다. 워크셀 매니저에서 설정하는 안전정지 모드와는 다른 개념으로, 태스크 실행 중 흐름 제어 명령어를 이용하여 작업을 중지/정지하고 종료할 수 있습니다.

이 과정에서는 태스크 라이터를 사용하여 작업을 중지/정지하고 프로그램을 종료하는 방법을 소개합니다.
2. 중지, 정지, 종료 명령어 알아보기
중지, 정지, 종료 명령어는 크게 모션과 흐름 제어 명령어로 구분 될 수 있습니다.
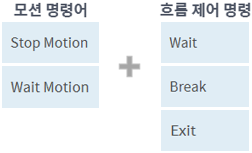
2.1 모션 명령어
1) Wait Motion: 선행하는 모션 명령어 종료 후 지정된 시간 동안 멈추기 위해 사용됩니다. 비동기 모션 대기 시간을 정의하고, 동기 모션처럼 선행 모션이 종료할 때까지 다음의 모션을 수행하지 않고 기다립니다.
2) Stop Motion: 태스크 실행 중 정지하기 위해 사용됩니다. QSTOP, SSTOP 두 가지로 분류되며, 각각 QSTOP은 빠르게 정지(Quick), SSTOP은 부드럽게 정지(Soft)합니다.
- QSTOP: 각 축이 손상되지 않는 최대 감속도로 모션을 정지합니다. 같은 무게라도 자세에 따라서 계산되는 관성(Inertia)에 따라 감속 시간이 달라집니다. 예를 들어 로봇이 펴져있는 상태에서는 감속 시간이 길어지고, 굽히고 있을 때는 감속 시간이 짧아집니다.
- STOP: QSTOP 감속 시간의 1.2배 적용, 로봇을 좀 더 부드럽게 정지합니다.
2.2 흐름 제어 명령
1) Wait: 태스크 실행을 일정 시간 동안 멈추기 위해 사용됩니다. 대기 시간 및 대기 입력을 정의합니다.
2) Break: 반복문(Repeat)을 빠져 나오기 위해 사용됩니다. 반복 구문을 중단합니다. 추가로 If Else, Sub Task 등의 구문에서도 빠져나올 때 사용할 수 있습니다.
3) Exit: 태스크 실행을 종료하기 위해 사용됩니다.
3. 중지, 정지, 종료 명령어 프로그래밍
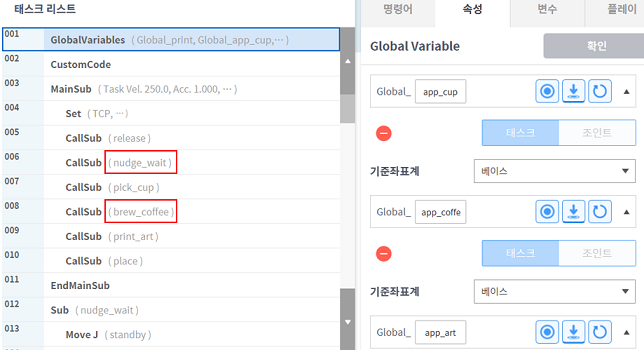
중지, 정지 그리고 종료 명령어 사용방법을 알아보겠습니다. 로봇을 이용하여 커피를 뽑는 작업 중, 넛지(Nudge, 로봇에 외력을 가하는 행동)을 통한 작업재개와 커피를 내리는 시간에 대기하는 등의 중지, 정지 명령어 프로그래밍을 해보겠습니다.
3.1 Stop Motion과 Break 설정
1) Repeat과 If를 이용하여, Y/Z축 방향으로 외력 20 N이 가해지면 작업이 재개되도록 설정합니다.
- check_force_condition(DR_AXIS_X, min=20) or check_force_condition(DR_AXIS_Y, min=20)
2) Stop Motion 속성에서 정지 모드를 ‘QSTOP’을 선택, 즉시 동작을 멈추게 하고 다음 작업을 수행하게 합니다.
3) Break를 사용하여 반복 구문을 중지 시킵니다.
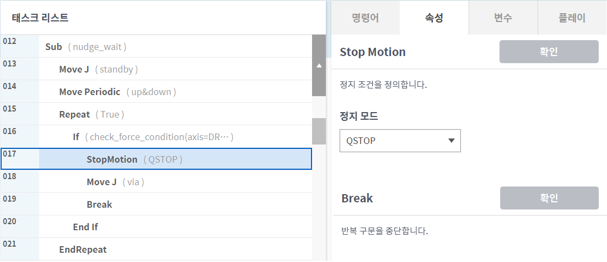
※ ‘End If’와 ‘End Repeat’은 If, Repeat 명령어 추가 시 자동으로 입력됩니다.
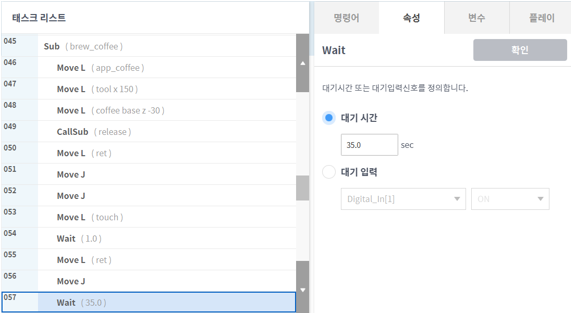
3.2 Wait 설정
Wait의 속성에서 커피 추출하는 시간을 반영하여 대기하게 합니다. 이후, 로봇은 커피를 집기 위해 다가갑니다. 대기 시간 설정으로 작업과 작업 사이의 로봇의 움직임을 제어할 수 있습니다.
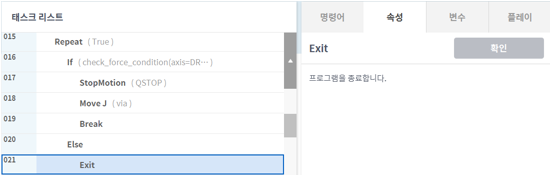
3.3 Exit 설정
Exit 명령어의 경우, 예를 들어 If와 Else 구문을 이용하여 조건에 따른 참/거짓 값을 설정 후, If 조건이 충족 되지 않을 때, Else 이하를 실행시켜 작업을 종료시킬 수 있습니다.
4. 정리
이번 과정에서는 두산 로봇의 태스크 라이터의 중지, 정지, 종료 명령어를 이용하여 작업을 제어하는 방법을 알아봤습니다. 보다 상세한 사용 방법은 사용자 & 프로그래밍 매뉴얼에서 확인할 수 있습니다.
참고 자료
- 두산로보틱스 사용자 & 프로그래밍 매뉴얼, https://robotlab.doosanrobotics.com
- 파이썬 공식 홈페이지, https://www.python.org
※ 본 자료의 모든 내용과 도안에 대한 저작권 및 지적재산권은 두산로보틱스에 있습니다. 따라서 두산로보틱스의 서면 허가 없이 사용, 복사, 유포하는 어떠한 행위도 금지됩니다. 또한 특허권을 오용하거나 변용하는데 따르는 책임은 전적으로 사용자에게 있습니다.
추천 교육
여러분에게 도움이 될 수 있는 추천 교육 과정들을 확인하세요.
문서
힘 제어를 이용한 프로그래밍 방법
문서
무선 공유기 사용방법
문서
DART-Studio 사용 방법 – 태스크 관리