Log In
튜토리얼
문서
전기 그리퍼 사용 방법 - 디지털 I/O
필수
30 분
이 과정에서는 전기 그리퍼 사용 방법을 소개합니다.
- 1 . 시작하기
1. 시작하기
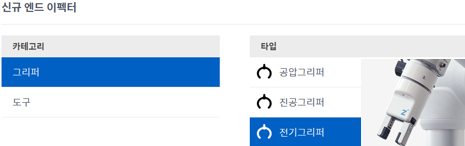
두산 로봇에서는 워크셀 매니저를 이용하여, 엔드이펙터(End Effector)를 설정할 수 있습니다. 엔드이펙터는 로봇이 태스크를 실행하기 위하여 로봇의 툴 플랜지에 부착되어 작업 대상에 직접 작용하는 기능을 가진 장치로 그리퍼(공압, 전기, 진공 그리퍼)와 도구(스크류드라이버, 글루잉 툴 등)이 있습니다. Doosan Mate에서 두산 로봇과 연동 가능한 파트너사 제품들을 확인할 수 있습니다.

이 과정에서는 전기 그리퍼 사용 방법을 소개합니다.
2. 전기 그리퍼 설정하기
전기 그리퍼는 로봇으로부터 공급되거나 외부 전원으로부터 공급받는 전력으로 작동하는 그리퍼입니다. 핑거가 부착되어 대상물을 잡거나 놓을 때, 디지털 신호로 동작을 합니다. 전기 그리퍼는 단순히 잡기/놓기 동작 외에 동작 거리, 힘, 속도 등의 제어가 가능하여 다양한 어플리케이션에 사용이 가능합니다. 다음은 전기그리퍼에 대한 하드웨어 연결 및 설정 화면입니다.
2.1 로봇 연결
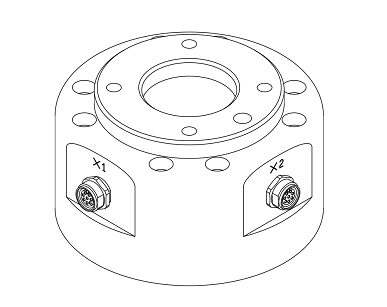
플랜지에 M8 8핀 커넥터에 케이블을 연결합니다. M시리즈의 경우, 커넥터는 X1, X2 두 개이며, 예를 들어 X1에 연결했을 경우, 잡기/놓기 동작 포트는 1~3번이 됩니다.
※ 플랜지 M8 8핀 커넥터 연결이 가능한 경우는 디지털 I/O를 사용하는 그리퍼에 한정되며, 모드버스나 이더넷 통신이 필요한 그리퍼는 로봇 제어기의 LAN에 연결을 해줘야 합니다.
2.2 통신 설정
워크셀 매니저, 엔드이펙터에서 전기 그리퍼를 선택 후, ‘편집’을 누르면 다음과 같이 인터페이스 화면이 나타납니다. Zimmer사 HRC-03 시리즈 디지털 I/O 방식 전기 그리퍼 앱을 설치하면, 그리퍼 이름 및 제조사 로고가 보입니다.

① 워크셀 이름 입력창: 전기 그리퍼 이름을 설정할 수 있습니다.
② 출력 신호: 출력 신호 타입(컨트롤러, 플랜지, 모드버스)를 선택합니다.
③ 포트 번호: 출력 신호 포트를 선택하면 입력 신호의 상태를 확인할 수 있습니다.
④ 입력 신호: 입력 신호의 타입을 선택합니다.
⑤ 그리퍼 센서: 담힘, 열림 센서가 정상적으로 연결되면 녹색으로 표시됩니다.
2.3 툴 중심 위치 설정
툴 중심 위치를 설정할 때, 플랜지 좌표계를 기준으로 위치와 함께 회전각을 함께 정의해야 합니다. 이 때, 플랜지 좌표계 기준 원점에서 툴 중심 위치까지 X, Y, Z 각 방향 별 거리가 500 mm 이상 되도록 설정 할 수 없습니다.

⑥ 위치 정보: 자동 계산 시, 위치 정보만 입력되고 회전각은 사용자가 입력해야 합니다.
⑦ 자동 계산: 서로 다른 포인트 1~4를 직접 교시 하여 포즈를 저장하고 TCP를 자동 계산을 통해서 구할 수 있습니다.
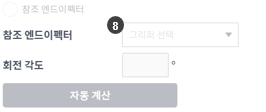
⑧ 대칭형 더블 그리퍼 사용 시, 이미 설정된 엔드이펙터 기준으로 TCP를 설정합니다. 기준이 되는 엔드이펙터의 툴 좌표계 상 TCP 위치와 자세를 툴 Z축을 기준으로 입력된 각도만큼 회전하여, 설정할 수 있습니다.
※ 설정하고자 하는 엔드이펙터와 기준이 되는 엔드이펙터는 툴의 Z축 기준으로 반드시 회전 대칭이어야 합니다. 별도의 교육 과정에서 대칭형 더블 그리퍼 관련 상세 설명을 확인하실 수 있습니다.
2.4 엔드이펙터 앱 설치
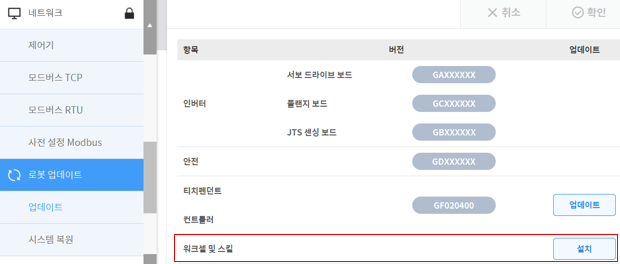
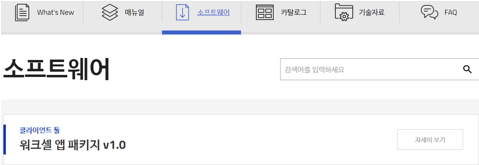
‘Robot LAB - 소프트웨어 - 워크셀 앱 패키지’에서 각 엔드이펙터 앱 모음을 다운로드 후, 설정 메뉴에서 설치할 수 있습니다.
3. 전기 그리퍼 스킬 알아보기
전기 그리퍼 앱은 공압, 진공 그리퍼와 마찬가지로 신규 엔드이펙터 설정시 기본적으로 탑재되어 있습니다. Zimmer사의 HRC-03 시리즈를 예시로 들어보겠습니다.
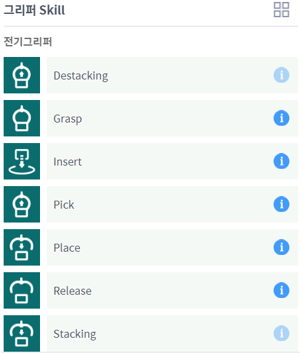
3.1 스킬 종류
잡기/놓기, 쌓기/내려 놓기 등 다양한 전기 그리퍼 스킬이 사전 정의(Pre-Defined) 되어 있습니다. 예를 들어, Pick과 Place 스킬 사용 시, 별도의 모션 명령어 추가 없이 접근/후퇴/이동 등을 속성에서 설정할 수 있습니다.
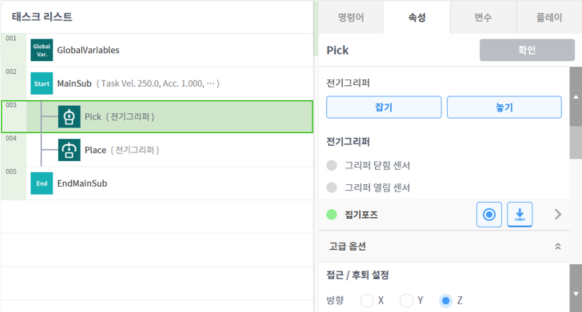
3.2 전기그리퍼를 이용한 프로그래밍
워크셀 매니저에서 엔드이펙터 설정 후, 그리퍼 스킬 중 Pick과 Place를 눌러 태스크를 작성합니다. 디지털 I/O 설정이 올바르게 되어 있고, 잡기/놓기 포즈를 정확히 입력하면, Pick & Place를 손쉽게 할 수 있습니다.
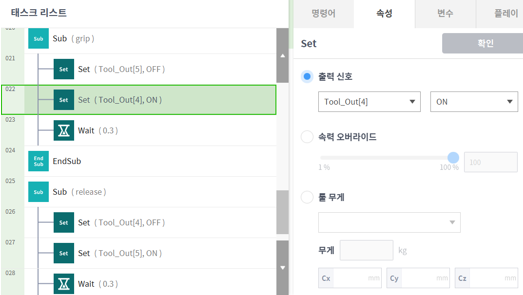
3.3 디지털 I/O 설정
SET을 이용하여, 전기그리퍼 잡기/놓기 출력 신호를 태스크에 설정, 흐름 제어 명령인 Sub을 이용하여, 작업 중 잡기/놓기 동작 제어가 가능합니다. X2 커넥터에 연결, 플랜지 출력 신호를 각각 4번, 5번으로 잡기/놓기를 지정합니다. 잡기(Grasp)를 설정하기 위해, 출력 신호 4번을 ON으로, 5번을 OFF로 설정하고 입력된 서브루틴을 가져오는 Call Sub를 설정하면, 해당 작업라인에서 그리퍼를 닫아 대상물을 잡도록 설정할 수 있습니다.
4. 정리
이번 과정에서는 두산 로봇이 제공하는 워크셀 매니저의 전기 그리퍼 사용 방법에 대해 알아봤습니다. 전기 그리퍼의 통신, TCP 설정 및 전기그리퍼 스킬을 이용하여 다양한 작업이 가능합니다. 보다 상세한 사용 방법은 사용자 & 참조 매뉴얼에서 확인할 수 있습니다.
참고 자료
- 두산로보틱스 사용자 & 참조 매뉴얼, https://robotlab.doosanrobotics.com
- Doosan Mate, https://www.doosanrobotics.com/ko/Mate/Mate
- Zimmer Group, https://www.zimmer-group.de/en
※ 본 자료의 모든 내용과 도안에 대한 저작권 및 지적재산권은 두산로보틱스에 있습니다. 따라서 두산로보틱스의 서면 허가 없이 사용, 복사, 유포하는 어떠한 행위도 금지됩니다. 또한 특허권을 오용하거나 변용하는데 따르는 책임은 전적으로 사용자에게 있습니다.
추천 교육
여러분에게 도움이 될 수 있는 추천 교육 과정들을 확인하세요.
문서
힘 제어를 이용한 프로그래밍 방법
문서
무선 공유기 사용방법
문서
DART-Studio 사용 방법 – 태스크 관리