Log In
튜토리얼
문서
로봇 시뮬레이션 – RoboDK 사용 방법
고급
60 분
이 과정에서는 두산로봇을 이용한 로봇 시뮬레이션을 위해 RoboDK를 사용하는 방법을 소개합니다.
1. 시작하기
로봇을 이용한 자동화 시스템을 구축하기 위해서는 로봇을 현장에 설치하고 직접 프로그래밍하는 것도 가능하지만, 다양한 조건을 테스트하고 준비 시간을 단축하기 위해 오프라인 프로그래밍(Off-Line Programming, OLP) 소프트웨어를 사용할 수도 있습니다.
RoboDK는 상용 오프라인 프로그래밍 소프트웨어 중 하나로, 현재 두산로봇의 모델이 라이브러리에 포함되어 있어 손쉽게 로봇 동작을 테스트 해 볼 수 있습니다.

이 과정에서는 두산로봇을 이용한 로봇 시뮬레이션을 위해 RoboDK를 사용하는 방법을 알아보겠습니다.
※ RoboDK는 다음의 링크에서 체험 버전을 다운로드 받아 설치할 수 있습니다: https://robodk.com/download
2. 로봇 추가하기
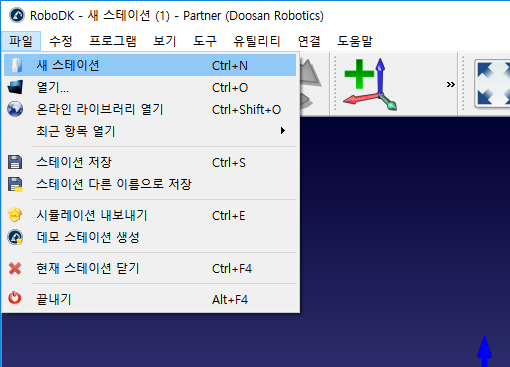
a. 파일 – 새 스테이션을 선택하여 새 프로젝트를 추가합니다.
RoboDK에서는 RDK 스테이션이라는 단위로 프로젝트를 관리할 수 있습니다. 이 RoboDK 스테이션은 로봇, 툴, 좌표계, 객체 등의 정보를 포함합니다.
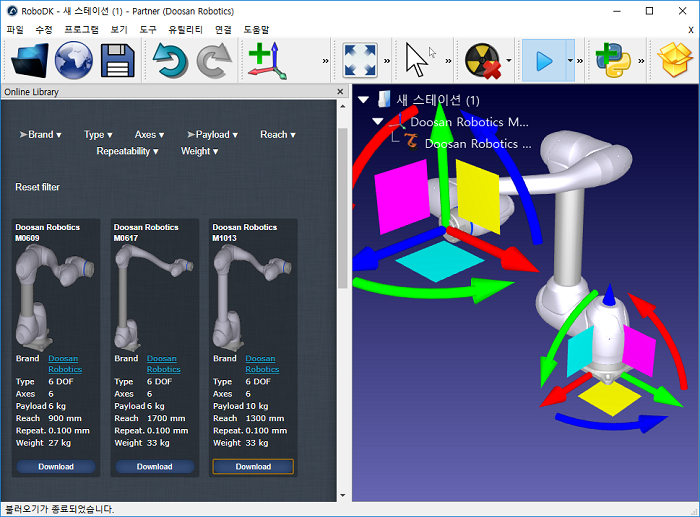
b. 파일 – 온라인 라이브러리 열기를 선택하여 두산 로봇을 추가합니다.
온라인 라이브러리에서 브랜드 Doosan Robotics, 가반하중 10 kg을 선택하고, 검색된 M1013 로봇의 다운로드 버튼을 누르면 로봇이 추가됩니다.
3. 좌표계 추가하기
로봇의 동작 프로그램을 위해서 로봇의 자세를 지정하기 위해 좌표계를 사용해야 합니다. RoboDK에서는 선택된 로봇의 베이스 및 툴 좌표계뿐만 아니라 사용자가 직접 별도의 좌표계를 추가할 수 있습니다.
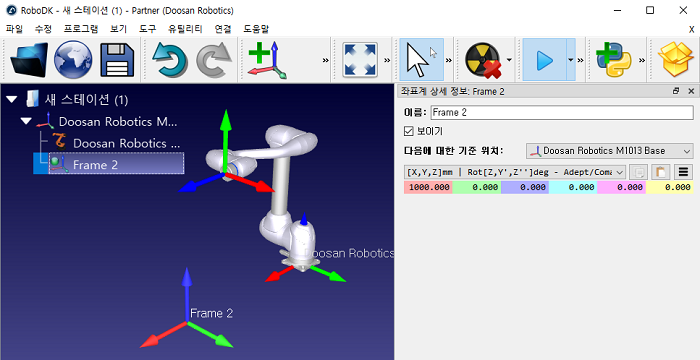
a. 프로그램 – 기준 좌표계 추가를 선택하여, 새로운 좌표계를 추가합니다.
b. 스테이션 트리에서 해당 좌표계를 선택하고, 옵션 메뉴에서 이름 및 위치 정보를 수정할 수 있습니다.
4. 3차원 객체 추가하기
RoboDK에서는 로봇 외에 여러가지 3D 모델을 시뮬레이션 화면에 추가할 수 있습니다. 지원 가능한 형식은 STL, STEP, IGES, WRML, 3DS 등입니다.
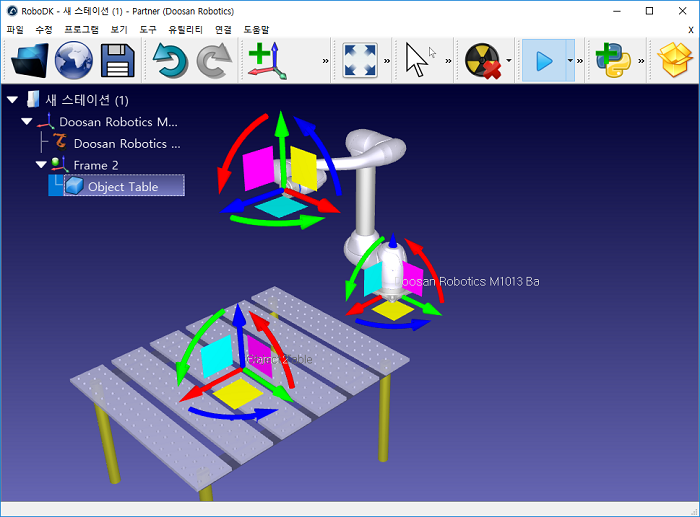
a. 파일 – 열기에서 Object Table.wrl 파일을 선택합니다. 추가된 모델이 로봇 베이스 아래에 위치하게 됩니다.
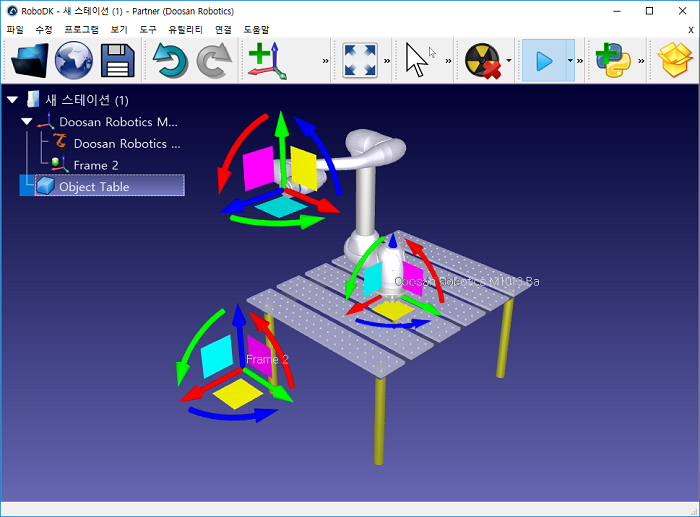
b. 스테이션 트리에서 Object Table 항목을 선택하고, Frame 2 좌표계 항목으로 드래그 앤 드랍을 하면 Frame 2 좌표계를 기준으로 위치가 이동되는 것을 확인할 수 있습니다.
5. 타겟 생성하기
RoboDK의 프로그램에서 로봇의 위치 정보는 타겟이라는 항목으로 저장이 됩니다.
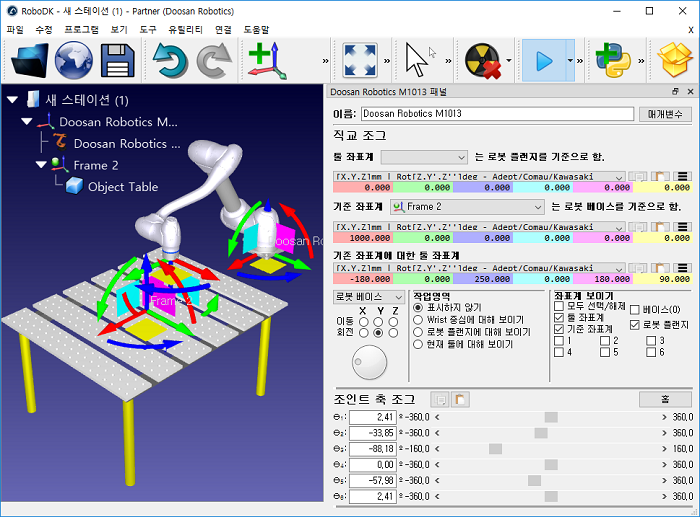
a. M1013 로봇을 두 번 클릭하고 나타난 로봇 패널에서 로봇을 원하는 자세로 이동합니다. 예를 들어, Frame 2를 기준으로 툴 좌표계를 [-180, 0, 250, 0, 180, 90]으로 입력합니다.
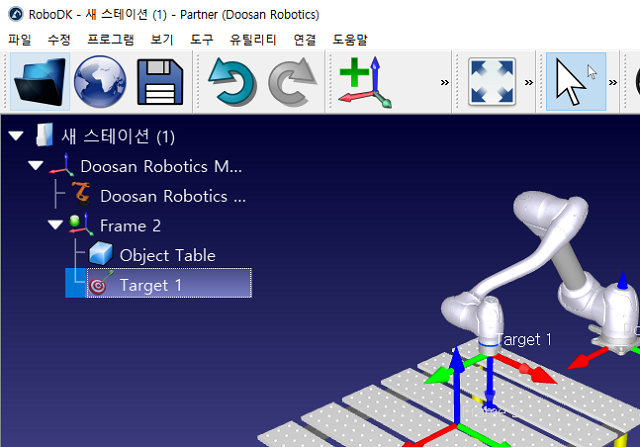
b. 프로그램 – 타겟 추가를 선택하여, 해당 위치를 타겟으로 저장합니다. 스테이션 트리에 Target 1 항목이 추가된 것을 확인 할 수 있습니다.
6. 로봇 프로그래밍
RoboDK에서는 타겟과 여러가지 이동 명령을 추가하여 로봇 동작을 구성하고 확인 할 수 있습니다.
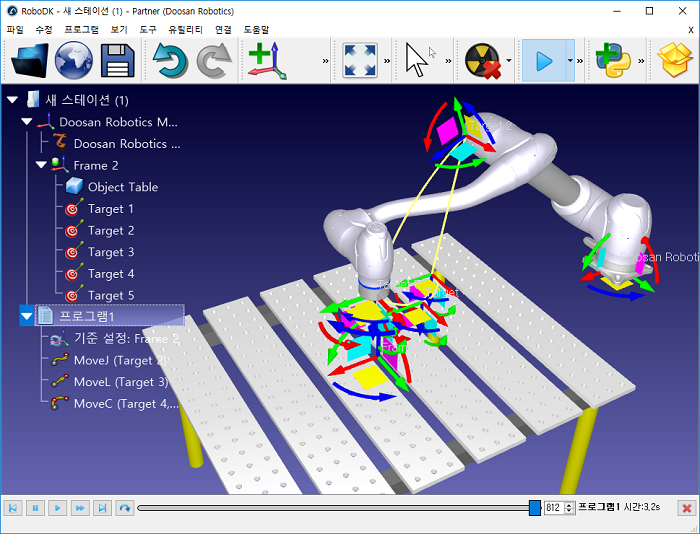
a. 프로그램 – 프로그램 추가를 선택하여, 새로운 프로그램을 추가합니다.
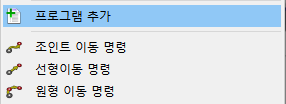
b. 현재 위치로 로봇이 조인트 형식의 이동을 하기 위해서는 프로그램 – 조인트 이동 명령을 선택하여 MoveJ 항목을 추가합니다.
c. 현재 위치로 로봇이 선형 형식의 이동을 하기 위해서는 프로그램 – 선형 이동 명령을 선택하여 MoveL 항목을 추가합니다.
d. 로봇이 원형 형식의 이동을 하기 위해서는 프로그램 – 원형 이동 명령을 선택하여 MoveC 항목을 추가합니다. MoveC의 경우 이동 경로를 구성하기 위하여 2개의 타겟 정보가 지정이 되어야 합니다.
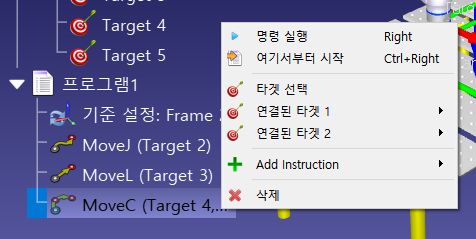
7. 프로그램 실행
작성된 로봇 프로그램은 시뮬레이션 기능을 이용하여 가상 환경에서 확인이 가능합니다.
프로그램 – 프로그램 실행을 선택하여, 로봇 동작을 확인 할 수 있습니다.
8. 정리
이번 과정에서는 두산로봇을 이용한 로봇 시뮬레이션을 위해 RoboDK를 사용하는 방법을 알아보았습니다. RoboDK의 온라인 라이브러리에는 두산로봇이 모두 추가되어 있어 손쉽게 로봇을 추가하고 이동 명령을 프로그램으로 구성하여 로봇의 동작을 시뮬레이션 해 볼 수 있습니다. 보다 상세한 사용 방법은 RoboDK의 홈페이지에서 제공되는 시작하기를 참고하시기 바랍니다.
참고 자료
- RoboDK 문서 – 시작하기, https://robodk.com/doc/ko/Getting-Started.html
※ 본 자료의 모든 내용과 도안에 대한 저작권 및 지적재산권은 두산로보틱스에 있습니다. 따라서 두산로보틱스의 서면 허가 없이 사용, 복사, 유포하는 어떠한 행위도 금지됩니다. 또한 특허권을 오용하거나 변용하는데 따르는 책임은 전적으로 사용자에게 있습니다.
추천 교육
여러분에게 도움이 될 수 있는 추천 교육 과정들을 확인하세요.
문서
힘 제어를 이용한 프로그래밍 방법
문서
무선 공유기 사용방법
문서
DART-Studio 사용 방법 – 태스크 관리