Log In
튜토리얼
문서
DART-Studio 사용 방법 – 태스크 관리
필수
30 분
이 과정에서는 두산로봇에서 제공하는 DART-Studio를
이용한 태스크 관리 방법을 알아보겠습니다.
- 1 . 시작하기
1. 시작하기
두산로봇은 오프라인 프로그래밍(Off-line Programming, OLP) 소프트웨어인 DART-Studio를 제공합니다. 태스크 관리자에서 DRL (Doosan Robot Language) 편집기를 이용한 프로그래밍 및 작성한 프로그램을 가상/실제 모드로 실행할 수 있습니다.

이 과정에서는 두산로봇에서 제공하는 DART-Studio의 태스크 관리 방법을 알아보겠습니다.
2. 프로젝트 탐색기
DRL 프로그램을 편집하고 실행하려면 새로운 프로젝트를 만들거나 이미 저장된 프로젝트를 열어야 합니다. 새 프로젝트 생성부터 프로젝트 열기, 저장 및 인쇄가 가능합니다.

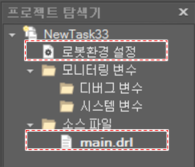
프로젝트 탐색기는 하기의 그림과 같이 트리 구조로 되어있고, 새 프로젝트를 만들면 소스 파일 부분에 main.drl 파일과 로봇 환경 설정이 생성됩니다. 또한 안전 영역을 포함한 로봇 설정 및 DRL 프로그램이 프로젝트 별로 저장되고 관리됩니다.
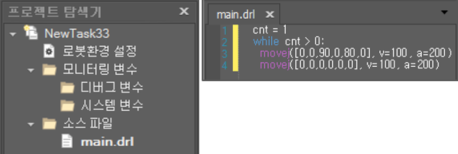
프로젝트 탐색기의 소스 파일을 클릭하여, 아래와 같이 DRL프로그램을 실행시킵니다.
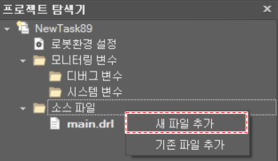
새로운 프로그램을 만들려면 프로젝트 탐색기의 소스 파일 트리 노드를 선택하고 오른쪽 마우스 버튼을 클릭합니다. 그리고 나서 새 파일 추가를 선택할 수 있습니다.
3. DRL 편집기
1) 텍스트 편집
텍스트 잘라내기, 복사, 붙여 넣기, 찾기 그리고 바꾸기 등을 실행할 수 있습니다.

DRL 편집기는 프로그래밍을 위한 간단한 텍스트 편집기로 기본 사용법은 ‘메모장’과 비슷합니다.
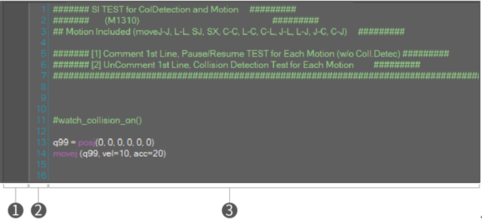
① 북 마크와 중단점을 표시합니다. 만약 중단점을 추가하고자 하면 추가 할 영역을 클릭하면 됩니다.
② 라인 수를 표시합니다.
③ DRL 프로그램 작성을 위한 텍스트를 편집할 수 있습니다.
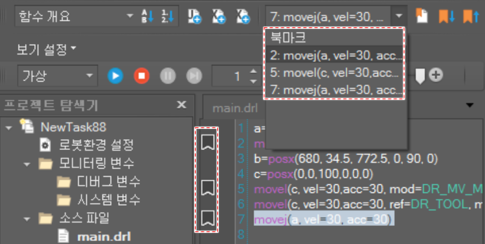
2) 북마크
현재 설정된 북마크 목록을 확인할 수 있고, 목록에서 선택한 북마크로 이동 가능합니다. 북마크를 추가하거나 삭제하려면 커서를 텍스트 줄에 위치 시키고 툴 바에서 북마크 추가/삭제 버튼을 클릭하거나 F2 키를 누릅니다.

만약 커서가 위치한 라인에 북 마크가 없으면 새로운 북 마크가 추가되고 북마크 목록이 업데이트 됩니다. 북마크 목록에서 북마크를 선택하면 커서는 해당 위치로 이동합니다.
툴 바에서 다음 북 마크로 이동 버튼을 클릭하거나 Ctrl + F2 키를 누르면 커서는 현재 위치에서 가장 가까운 다음 북 마크로 이동합니다. 툴 바에서 이전 북 마크로 이동 버튼을 클릭하거나 Shift + F2 키를 누르면 커서는 현재 위치에서 가장 가까운 이전 북 마크로 이동합니다.

3) 텍스트로 현재 위치 가져오기
- Posj 위치 가져오기
툴 바에서 현재 조인트 각도 텍스트 추가 버튼을 클릭하거나 Ctrl+Q 키를 누르면 현재 조인트 위치를 삽입할 수 있습니다.
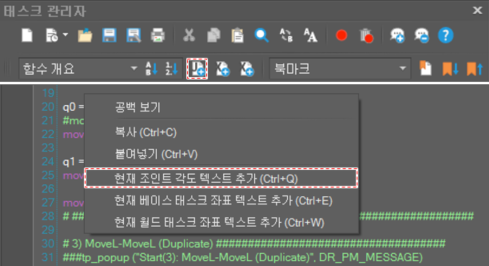
현재 관절 각도 값이 현재 커서 위치에 삽입됩니다.
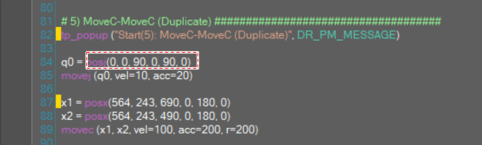
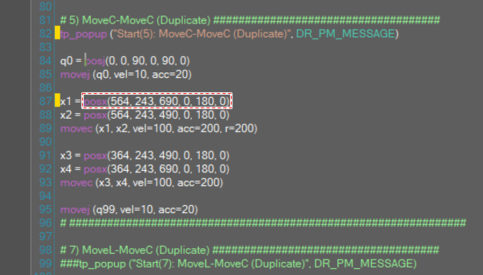
- Posx 위치 가져오기
툴 바에서 현재 베이스 태스크 좌표 텍스트 추가(Ctrl+E) 또는 현재 월드 태스크 좌표 텍스트 추가(Ctrl+W) 버튼을 클릭하면 현재 태스크 좌표를 삽입할 수 있습니다.
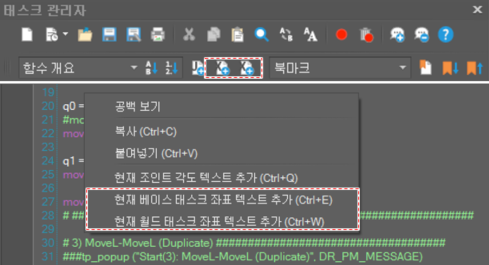
현재 태스크 위치 값이 현재 커서 위치에 삽입됩니다.
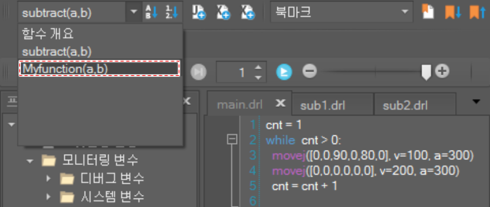
4) 함수 개요
함수를 정의하고 파일을 저장하면 함수 개요 목록이 업데이트 됩니다. 그리고 함수 개요 목록 상에서 함수를 선택하면 커서가 해당 함수가 정의된 라인으로 이동합니다.
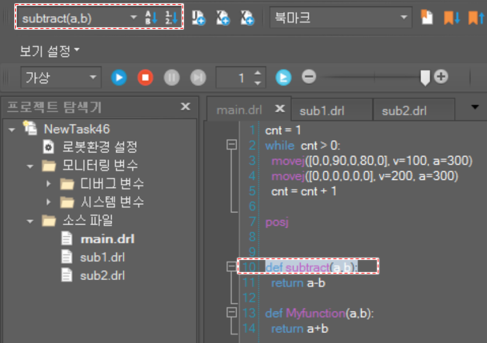
함수 목록에서 함수 이름순으로 혹은 라인 번호순으로 함수 목록을 정렬할 수 있습니다.
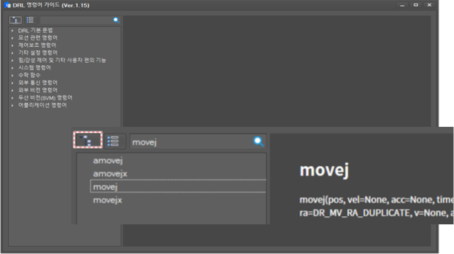
5) DRL 가이드
툴 바에서 DRL Help 버튼을 클릭하거나 F1 키를 누르면 DRL 명령어 가이드 창이 나타납니다.

DRL 명령어를 검색하려면 찾고자 하는 키워드를 입력 창에 넣고 검색 버튼을 누릅니다. 리스트 상에서 명령어를 클릭하면 해당 명령어의 설명이 우측에 나타납니다. 명령어 트리로 되돌아 가려면 트리 버튼을 클릭합니다.
4. 프로그램 실행하기
1) 실행 모드
툴 바에서 실행 대상을 선택하여 프로그램을 실행합니다.
- 가상: 프로그램이 가상 모드로 실행됩니다.
- 로봇: 프로그램이 실제 모드로 실행됩니다.

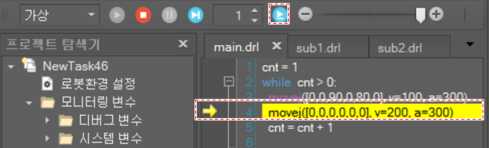
툴 바에서 프로그램 실행 버튼을 클릭하고, 오류가 없을 경우, 현재 실행 라인이 편집기 상에 표시됩니다. 아래와 같이 프로그램 중지, 일시 정지, 재개 버튼을 클릭하여 제어할 수 있습니다.

2) 라인 별 프로그램 실행
프로그램 실행이 일시 정지되었을 때 다음 라인 실행 버튼을 클릭하면 다음 프로그램 라인에 도달하면 실행 중인 프로그램이 다시 일시 정지됩니다
프로그램 실행이 일시 정지된 경우, 선택된 라인은 다음 실행라인을 의미합니다.

프로그램을 멀티라인으로 실행하기 위해 실행될 라인 카운트를 변경할 수 있습니다.
3) 중단점 설정
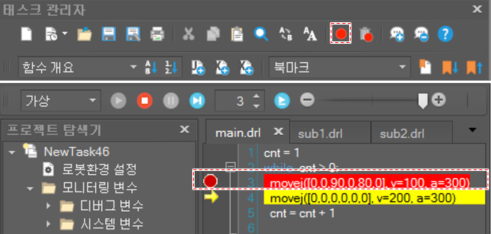
중단점이 프로그램 라인에 설정되면 실행 중인 커서가 라인에 도달했을 때 프로그램 실행이 일시 중지됩니다. 커서가 중단점이 없는 라인에 있을 때 툴 바에서 중단점 설정/해제 버튼을 클릭하거나 F9 키를 클릭하면 중단 점이 해당 라인에 추가됩니다.
중단점이 있는 라인에 커서가 있을 때 중단점 설정/해제 버튼을 클릭하거나 F9키를 누르면 해당 라인에 중단점이 제거됩니다. 모든 중단점을 한번에 제거하려면 모든 중단점 삭제 버튼을 클릭하거나 Ctrl + Shift + F9 키를 누르십시오.

4) 실행 속도 변경
프로그램 실행 중에 속도 슬라이더 바의 값을 변경합니다. 속도 비율을 변경하면 프로그램 실행 속도가 해당 비율만큼 감소합니다.

5. 정리
이번 과정에서는 두산 로봇에서 DART-Studio를 이용하여 DRL 작성, 편집 및 프로그램 실행 방법을 알아봤습니다. 오프라인 프로그래밍 툴을 이용하여 로봇을 작동하고 프로그램을 관리할 수 있습니다. 보다 자세한 내용은 DART-Studio 사용자 매뉴얼 및 프로그래밍 매뉴얼을 참고하시기 바랍니다.
참고 자료
- DART-Studio 사용자 매뉴얼 & 프로그래밍 매뉴얼, https://robotlab.doosanrobotics.com
※ 본 자료의 모든 내용과 도안에 대한 저작권 및 지적재산권은 두산로보틱스에 있습니다. 따라서 두산로보틱스의 서면 허가 없이 사용, 복사, 유포하는 어떠한 행위도 금지됩니다. 또한 특허권을 오용하거나 변용하는데 따르는 책임은 전적으로 사용자에게 있습니다.
추천 교육
여러분에게 도움이 될 수 있는 추천 교육 과정들을 확인하세요.
문서
힘 제어를 이용한 프로그래밍 방법
문서
무선 공유기 사용방법
문서
DART-Studio 사용 방법 – 기능 소개, 로봇 모니터링/제어