Log In
튜토리얼
문서
워크셀 매니저와 태스크 빌더 소개
기초
60 분
이 과정에서는 두산 로봇에서 제공하는 워크셀 매니저와 태스크 빌더를 소개합니다.
- 1 . 시작하기
1. 시작하기
협동로봇을 이용해서 자동화를 구성하려면, 앞서 다루어졌던 기본적인 설정과 함께 로봇 작동을 위해 필요한 작업(Task/태스크)를 구성해야 합니다. 이러한 과정을 로봇 프로그래밍 또는 태스크 프로그래밍이라고 할 수 있으며, 두산 로봇에서는 프로그래밍을 위해 크게 두 가지 방법을 제공하고 있습니다.
- 태스크 빌더(Task Builder): 아이콘 형태로 로봇 및 주변기기 작동에 관한 스킬(Skill)을 제공하여, 직관적이고 손쉬운 프로그래밍 환경을 제공합니다.
- 태스크 라이터(Task Writer): 로봇 작동에 관련된 다양한 명령어를 제공하여, 정교하고 다양한 태스크 프로그래밍이 가능합니다.
이 과정에서는 두산 로봇에서 제공하는 워크셀 매니저와 태스크 빌더를 사용한 프로그래밍 방법에 대해 알아보겠습니다.
워크셀 매니저는 일정의 주변기기 설정 메뉴입니다. 여기서는 두산 로봇(스마트 셋업, 안전 설정 등)뿐만 아니라 로봇 자동화 구성에 필수적인 엔드이펙터(End Effector), 작업 기계(Machine), 주변장치(Peripheral)에 대해 연결 설정에 필요한 앱(App)을 추가 할 수 있습니다.
그리고 태스크 라이터는 스킬이라는 두산 로봇 고유의 아이콘 형태의 명령어 단위로 로봇 작업을 프로그래밍 할 수 있습니다. Move J, Move L과 같은 기본적인 로봇 작동 스킬 뿐만 아니라 앞서 소개한 워크셀 매니저에서 설정된 주변기기들에 맞춰 사전에 정의된 스킬을 이용해 빠르고 손쉽게 작업 프로그램을 구성할 수 있습니다.
2. 워크셀 매니저 알아보기
일반적으로 로봇과 주변기기의 연동은 디지털 또는 아날로그 신호나 산업용 통신으로 연동이 가능합니다. 하지만, 이러한 연동을 위해서는 사용자가 해당 신호 및 로봇에서 제공되는 관련 명령어 사용에 대한 프로그래밍 방법을 학습해야 합니다. 워크셀 매니저는 이러한 학습의 어려움을 해소하기 위해, 스마트 폰과 유사한 사용자 인터페이스를 제공합니다. 따라서, 사용자는 사전에 주변기기와 통신에 필요한 명령어를 공부할 필요 없이, 워크셀 매니저의 설정 화면을 통해 손쉽게 로봇과 주변기기의 연결에 필요한 앱을 추가할 수 있습니다.
2.1 워크셀 매니저 기본 화면
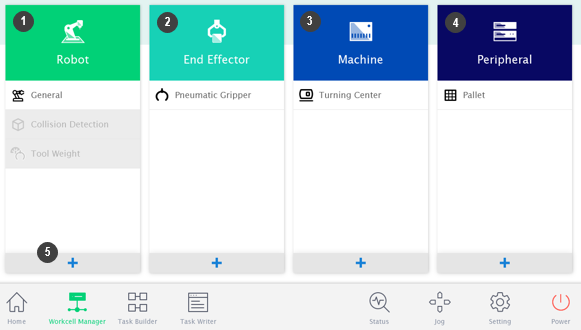
① 로봇: 설치 자세, 툴 무게, 작동 공간 및 충돌 감지 무효 구역 등 환경에 대한 설정 항목을 추가할 수 있습니다. 자세한 내용은 온라인 교육 기초 과정, 스마트 셋업(자동 측정 기능) 사용 방법을 참고하시기 바랍니다.
② 엔드이펙터: 그리퍼, 스크류드라이버, 여러 가지 툴을 추가 할 수 있습니다.
③ 기계: 프레스 머신, 터닝 센터, 사출기 등 장비를 추가 할 수 있습니다.
④ 주변장치: 팔레트 패턴, 에어블로우, 컨베이어 등 연결된 장치를 추가 할 수 있습니다.
⑤ 추가 버튼: 각 항목에 선택 가능한 앱을 추가합니다.
※ 비활성화된 워크셀 아이템은 해당 아이콘을 클릭 후, 토글 버튼을 이용하여 활성/비활성 할 수 있습니다. 여러 가지 아이템을 추가할 수 있고, 필요한 아이템을 활성화 및 선택 할 수 있습니다.
2.2 엔드이펙터 설정하기
엔드이펙터의 설정은 로봇과 연동을 위한 통신과 툴 중심 위치 탭으로 구분이 됩니다.
통신 탭에서는 디지털 신호 또는 Modbus-TCP를 이용하는 엔드이펙터와 로봇의 연동을 위해 필요한 신호 또는 통신 설정을 입력합니다.
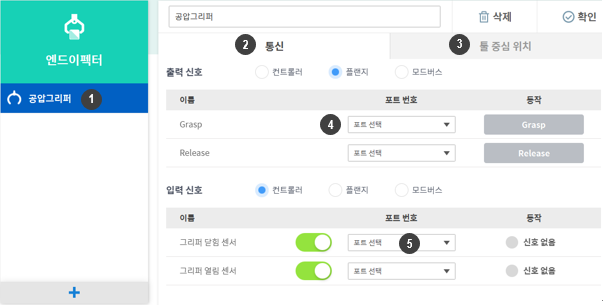
① 엔드이펙터는 공압, 진공, 디지털 그리퍼 외 스크류드라이버, 글루잉툴, 디버링툴, 폴리쉬, 에어블로우 노즐 등의 도구가 있으며, 그 외 사용자 툴을 등록할 수 있는 설정 기능을 제공합니다.
② 입출력 신호(I/O)를 설정합니다.
③ 툴 중심 위치(TCP)를 설정합니다.
④ 출력 신호의 포트 선택 및 동작을 테스트 할 수 있습니다.
⑤ 출력 신호 포트를 선택 하고, 입력 신호 상태를 확인 할 수 있습니다. 정상적으로 입력 되면 녹색으로 표시됩니다.
툴 중심 위치 탭에서는 로봇의 끝단(flange)의 중심점이 아닌 사용자가 추가로 장착한 엔드이펙터에 대한 기준점(중심 위치)을 정의합니다.
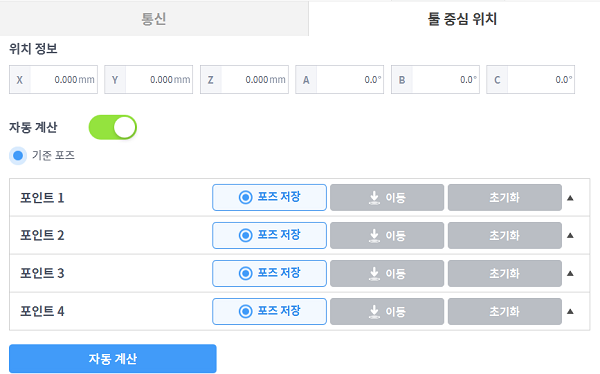
툴 중심 위치를 설정할 때에 플랜지 좌표계를 기준으로 위치와 함께 회전각을 함께 정의해야 합니다.
툴 중심 위치를 설정하실 때는 아래의 사항에 유의하여 진행해주세요.
- 플랜지 기준 원점에서 TCP까지 각 방향 별 거리가 500mm 이상이 되도록 설정 할 수 없고, 회전각 A, B, C는 사용자가 입력해야 합니다.
- 대칭형인 더블 그리퍼 사용 시 이미 잘 설정된 하나의 엔드이펙터를 기준으로 다른 하나의 엔드이펙터의 TCP 위치를 설정합니다. 기준이 되는 엔드이펙터의 툴 좌표계 상 TCP 위치와 자세를 툴 Z축을 기준으로 입력된 각도만큼 회전하여 새로운 엔드이펙터의 TCP 위치를 간편하게 설정할 수 있습니다.
[따라 해보기]
1) 사용하고자 하는 엔드이펙터의 앱을 추가해 보세요.
A. 일반적인 공압, 전기, 진공 형식의 그리퍼는 대부분 기본 앱으로 사용이 가능합니다.
B. 두산 메이트(Mate)에 등록되어 있는 특정 파트너사의 제품을 사용하고자 하신다면, 홈 화면 우측 하단 설정 메뉴에서 로봇 업데이트를 클릭, 워크셀 및 스킬 항목에서 설치 버튼을 눌러 추가 할 그리퍼의 앱 설치 파일(*.dr3)을 찾아 설치하시기 바랍니다.
2) 이 후, 엔드이펙터 메뉴에서 추가 버튼을 눌러 입/출력 신호, 툴 중심 위치 등을 설정 하고 동작을 테스트 해보세요.
※ 엔드이펙터 설정, 입/출력 신호, 툴 중심 위치의 상세한 설정 방법은 사용자 & 레퍼런스 매뉴얼을 참조하세요.
2.3 작업기계 설정하기

① 워크셀 매니저에 등록할 수 있는 작업기계는 다음과 같습니다.
- 터닝 센터: 원통형의 가공소재를 회전시키면서 툴 터렛의 공구를 이동하여 입력된 형상을 절삭 가공하는 장비
- 프레스 머신: 납작한 소재를 압착하여 원하는 형상으로 가공하는 장비
- 사출성형기: 플라스틱 등의 재료를 금형 안에 주입하여 원하는 형상으로 성형하는 장비
② 엔드이펙터와 유사하게 출력/입력 신호를 설정합니다.
③ 동작 테스트를 통해, 정상적으로 작동하는지 확인 가능합니다.
※ 작업기계 종류 및 항목별 상세한 설명은 사용자 & 레퍼런스 매뉴얼을 참조하세요.
2.4 주변장치 설정하기
주변장치는 로봇, 엔드이펙터, 작업기계로 분류되지 않지만, 로봇과 상호 작동하는 워크셀 아이템 입니다. 워크셀 매니저에 등록할 수 있는 주변장치는 다음과 같습니다.
- 인코더: 디지털 전자회로에서 어떤 부호계열의 신호를 다른 부호계열의 신호로 바꾸는 변환기로 컨베이어 작업 시 주로 사용됩니다.
- 피더: 슈팅 볼트, 픽업 볼트 피더 등 나사 조립 시 볼트 공급하는 장치 및 대상물을 배치하는 여러 가지 팔레트 등이 있습니다.
- 비전: 대상물의 위치를 영상 정보를 통해 보정하는 장치입니다.
[따라 해보기]
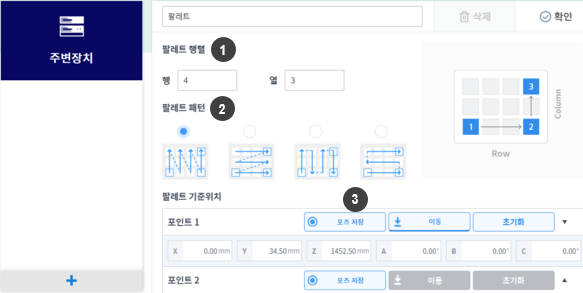
1) 팔레트 행과 열을 입력해보세요.
2) 팔레트 패턴을 설정하고. 우측에 있는 패턴 가이드의 1번 위치로 로봇 TCP를 이동시켜 보세요.
3) 포즈저장으로 해당하는 위치 좌표값을 포인트 1에 입력하세요. 패턴 가이드의 2번, 3번 위치로 로봇 TCP를 이동한 후 각각 위치를 저장해보세요.
※ 쌓거나 쌓은 물체를 집어 옮기는 위치에 대한 오프셋 방향을 팔렛트의 위/아래 방향에 맞게 자동 계산하기 위하여, 워크셀 아이템의 가이드 그림에 맞게 세 위치를 반 시계 방향 순서로 교시하기를 권장합니다.
3. 태스크 빌더 알아보기
태스크 빌더는 등록된 작업 환경 및 주변기기 정보에 따라 자동 추천된 아이콘 방식의 스킬 및 태스크 템플릿을 사용할 수 있는 손쉬운 프로그래밍 도구입니다.
- 스킬, 명령어, 탬플릿에 대한 상세 리스트는 별도로 제공되는 참조 매뉴얼에서 확인하시기 바랍니다.
3.1 태스크 생성하기
태스크 빌더 초기 화면에서 신규 탭을 클릭 후, 관련 있는 워크셀 아이템들을 선택 후, 다음을 누르면 하기와 같이 태스크 리스트가 생성됩니다.
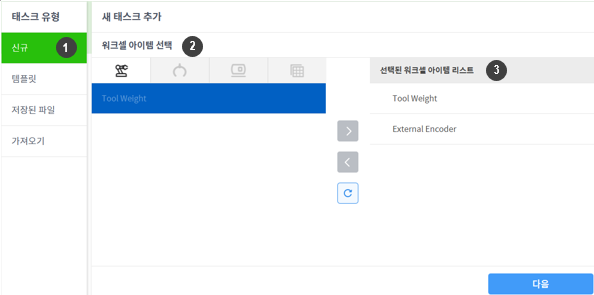
① 태스크 유형은 아래와 같습니다.
- 신규: 새로운 태스크를 생성하고, 태스크 이름을 저장합니다.
- 템플릿: 등록된 워크셀 아이템의 조합으로 사용할 수 있는 스킬들로 작업 절차를 구성한 스킬 모음입니다. 작업 프로세스에 대해 고민할 필요 없이 이미 구성되어 있는 스킬에 대한 설정만으로 간편하게 태스크를 만들 수 있습니다.
- 저장된 파일: 이전에 저장한 파일을 불러올 수 있습니다.
- 가져오기: 외부 저장 장치에 저장된 태스크를 가져올 수 있습니다.
(다음의 기능은 소프트웨어 버전이 M2.4.0 또는 그 이상인 경우에만 지원이 됩니다.)
② 워크셀 아이템 선택: 워크셀 매니저에서 설정한 워크셀 아이템들을 카테고리 별 선택 할 수 있습니다.
③ 선택된 워크셀 아이템 리스트: 태스크 생성에 필요한 아이템 리스트 현황이며 이전에 저장한 파일을 불러올 수 있습니다.
※ 저장된 태스크의 파일 확장자는 ‘.tb'입니다.
3.2 명령어 설정하기
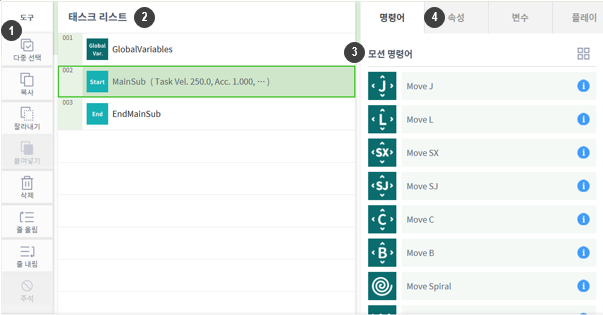
① 도구: 명령어를 다양한 유형으로 설정할 수 있습니다.
② 태스크 리스트: 태스크 순서와 명령어 탭에서 추가한 명령어 목록을 표시합니다.
- Global/Variables: 전역 속성 탭에서 태스크 프로그램의 변수 및 포즈를 입력할 수 있습니다. 사전 설정된 전역 변수와 전역 포즈는 태스크 리스트에 추가된 명령어의 속성 화면에서 사용할 수 있습니다.
- MainSub: 사용자가 선택한 명령어는 MainSub의 하단에 추가되며, 순차적으로 실행됩니다. 여기서 전역 속도 및 가속도를 설정할 수 있습니다.
③ 모션 명령어: 모션, 흐름, 힘 제어 명령 외에, 선택한 워크셀 아이템 명령어 (예, 그리퍼, 비전 등)의 명령어를 선택할 수 있습니다.
④ 속성: 각 모션 명령어의 개별 속성값을 설정 할 수 있으며, Global/Variables에 설정한 변수, 포즈 등을 사용할 수 있습니다.
3.3 실행(플레이) 해보기
로봇 작동 총 시간 외에도 엔드이펙터 정보, 충돌, 힘 및 입출력 정보를 확인 가능합니다. 그리고 하단의 속도 슬라이더를 이용하여 전체적인 속도 비율 조절 또한 가능합니다.
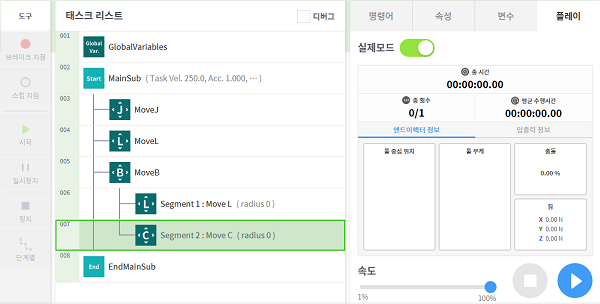
① 우측 상단 플레이 탭 선택합니다. 화면 전환 완료 시, 티치펜던트와 플랜지 LED는 청색에서 흰색 점등으로 변경 됩니다.
② 토글 버튼이 비활성화 시, 가상 모드(시뮬레이션)로 변경됩니다.
③ 실제모드(Real Mode)로 실행 시, 작성된 프로그램의 실제 로봇 작동을 통해 실행 결과를 확인할 수 있습니다.
4. 정리
이번 과정에서는 두산 로봇의 워크셀 매니저와 태스크 빌더 사용 방법을 알아봤습니다. 워크셀 매니저는 일정의 주변기기 설정 메뉴로써, 로봇 작업 구성에 필수적인 엔드이펙터, 작업 기계, 주변장치에 대해 연결 설정을 할 수 있습니다. 그리고 태스크 라이터는 워크셀 매니저에서 설정된 주변기기들을 지원하는 다양한 스킬을 이용해 빠르고 손쉽게 작업 프로그램을 구성할 수 있습니다.
참고 자료
- 두산로보틱스 사용자 & 참조 매뉴얼, https://robotlab.doosanrobotics.com
※ 본 자료의 모든 내용과 도안에 대한 저작권 및 지적재산권은 두산로보틱스에 있습니다. 따라서 두산로보틱스의 서면 허가 없이 사용, 복사, 유포하는 어떠한 행위도 금지됩니다. 또한 특허권을 오용하거나 변용하는데 따르는 책임은 전적으로 사용자에게 있습니다.
추천 교육
여러분에게 도움이 될 수 있는 추천 교육 과정들을 확인하세요.
문서
힘 제어를 이용한 프로그래밍 방법
문서
무선 공유기 사용방법
문서
DART-Studio 사용 방법 – 태스크 관리