Log In
튜토리얼
문서
안전 기능 소개 - Part 1. 안전 정지 및 감시, 안전신호 입출력
기초
60 분
이 과정은 두산 로봇의 안전 기능 중 안전 정지 및 감시, 입출력을 소개합니다.
1. 시작하기
협동 로봇은 작업자와 같은 공간에서 펜스 없이 사용될 수 있는 로봇입니다. 따라서, 작업자 및 로봇, 작업 공간의 안전을 위한 기능이 매우 중요합니다.
두산 로봇은 모든 축에 고성능 토크센서가 탑재되어 있어 업계 최고 수준의 충돌 민감도를 자랑합니다. 이러한 특징은 충돌감지를 포함하여 작업자와 함께 사용되기 위한 다양한 안전 기능으로 세분화 되어 제공됩니다.
두산 로봇은 다양한 안전 정격 기능 및 안전 관련 전기적 인터페이스를 사용하여 사용자와 기계를 보호하고, 다른 기계 및 추가 보호 장치에 연결할 수 있는 협동로봇입니다. 각 안전 정격 기능 및 인터페이스의 성능은 ISO 13849-1 에서 설명하는 Category 3, Performance Level d(PL d)와 IEC 62061에서 설명하는 Hardware Fault Tolerance 1, Safety Integrity Level 2(SIL 2)를 만족합니다. 또한, NRTL(미국), CE(유럽), KCs(한국) 인증도 확보되어 있습니다.
이 과정에서는 두산 로봇의 안전 기능 중 안전 정지 및 감시, 안전신호 입출력을 알아보겠습니다.
※ 안전 기능 관련 유의 사항
- 로봇 애플리케이션에 대해 시스템 통합자가 수행한 위험성 평가에 따라 안전 관련 기능 및 인터페이스를 사용하여 작업 셀을 구성하기 위해 필요한 정보는 본 두산로보틱스 설치 및 사용자 매뉴얼을 충분히 숙지하고 참조하세요.
- 로봇의 안전 시스템이 시스템결함을 발견하면, 즉 비상정지 회로의 선이 끊기거나, 위치 센서가 파손되거나, 제어용 통신 불량 등 하드웨어 이상이 감지되면 정지분류 0이 즉시 개시됩니다. 한편, 로봇의 안전시스템이 안전 감시 기능 수행 중 위반을 감지하면, 즉 비상정지 스위치가 눌리거나, 보호 정지신호가 입력되거나, 외부 충격이 감지되거나, 로봇의 위치, 속도, 운동량 등 물리적 파라메터가 설정한 제한치를 초과할 경우는 안전설정메뉴의 정지모드설정에 설정된 모드로 로봇을 정지시킵니다(정지분류 0, 1, 2중 택일).
2. 안전정격 정지 기능
두산 로봇의 안전 정지 기능 및 정지 상태 모니터링 기능은 IEC 61800-5-2에서 기술하는 안전 사양을 만족합니다.
사용자의 안전을 위해 제공되는 정지 모드는 다음과 같습니다.
- STO(Safe Torque Off): 정지 분류(Stop Category) 0에 해당하는 정지 모드로 모든 조인트 모듈의 모터 전원을 즉시 차단하고 브레이크 작동만으로 강제 정지합니다. 브레이크는 감속을 위한 제동 용도가 아니라 구동력이 상실(전원 차단 등)되었을 때 현재 자세를 유지하는 용도로 사용됩니다. STO를 사용할 경우 브레이크 마모나 감속기 수명이 단축될 수 있으므로 불가피한 경우가 아니면 SS1 사용을 권장합니다.
- SS1(Safe Stop 1): 정지 분류 1에 해당하는 정지 모드로 모든 조인트를 가능한 최대로 감속하여 멈춘 후 모터 전원을 차단하고 브레이크를 작동하여 정지합니다. STO와 마찬가지로 감속하여 멈춘 후 전원이 차단된 상태이므로 정지 기능 해제 후 서보 온(Servo On)을 해야 로봇을 작동할 수 있습니다.
- SS2(Safe Stop 2): 정지 분류 2에 해당하는 정지 모드로 모든 조인트를 가능한 최대로 감속하여 멈춘 후 SOS (Safe Operating Stop)로 전환됩니다.
이와 함께 사용되는 안전 정지상태 모니터링 기능은 아래와 같습니다.
- SOS(Safe Operating Stop): 모터 전원이 공급되고 브레이크를 작동하지 않은 상태(Servo On)로 현재 위치를 유지하는 모니터링 기능입니다. 비정상적인 위치 변화가 감지되면 STO로 전환됩니다.
사용자는 설정 메뉴의 안전 탭의 안전정지 모드에서 아래와 같은 조건에 대해 안전 정지 기능을 선택적으로 적용할 수 있습니다. 보다 상세한 기능 정의 및 정지 모드 사양은 설치 매뉴얼을 참고하시기 바랍니다.
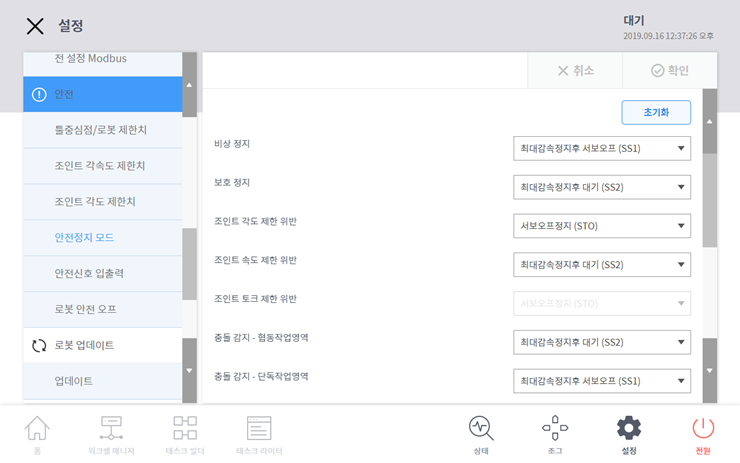
다음은 두산 로봇에서 지원되는 여러 정지 모드 중 대표적인 2가지 정지 모드에 대한 설명입니다.
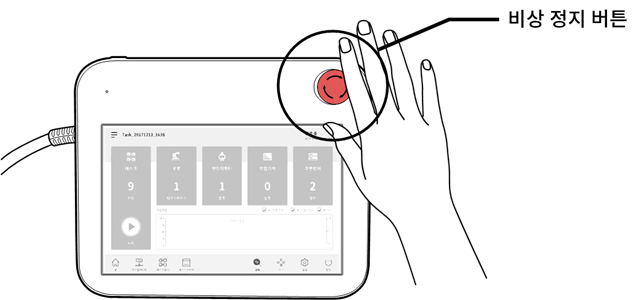
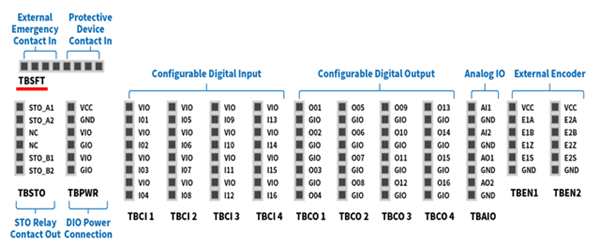
2.1 비상 정지: 티치 펜던트의 비상정지 스위치가 눌린 경우 또는 TBSFT의 EM단자에 연결된 비상정지스위치가 눌린 경우에 안전정지 기능이 작동합니다.
※ 비상 정지 유의 사항
- 비상 정지 버튼의 경우 SS1 정지 모드가 기본값으로 설정되어 있습니다.
- 추가로 비상 정지 버튼이 필요할 경우 위험 평가를 진행한 후 컨트롤박스에 부착할 수 있습니다.
- 비상 정지는 위험 감소 방법으로 사용해서는 안 되고 2차 보호 장치로 사용해야 합니다.
- 비상 정지 버튼이 추가로 필요한 경우 로봇 애플리케이션에 대한 위험성 평가를 실시해야 합니다. 추가되는 비상 정지 버튼은 IEC 60947-5-5를 준수해야 합니다.
[따라 해보기]
설정 – 안전 – 안전정지 모드 메뉴에서 비상 정지 항목을 STO와 SS1으로 각각 변경해보고, 로봇의 동작 중 비상 정지 버튼을 눌러 정지 모드의 차이를 확인해 보세요.
2.2 보호 정지: TBSFT의 PR단자에 연결된 보호장치가 가동된 경우에 안전정지 기능이 작동합니다.
3. 안전정격 감시 기능
두산 로봇은 위험성평가를 통한 위험 저감조치로 사용 할 수 있는 안전정격 감시 기능을 로봇에서 직접 제공합니다.
감시 기능이 적용되는 항목은 아래와 같습니다. 보다 상세한 기능 정의 및 정지 모드 사양은 설치 매뉴얼을 참고하시기 바랍니다.
- 조인트 위치 감시: 조인트의 최대 회전 각도 제한
- 조인트 속도 감시: 조인트의 최대 회전 속도 제한
- TCP 위치 방향 감시: 직교공간에서 TCP 의 위치 방향 제한 및 감시(운전영역, 단독작업영역, 협동작업영역, 침범금지영역, 공구방향 유지감시 영역, 충돌감지 등 별도 지정영역)
- TCP 속도 감시: TCP 가 동작 가능한 최대 이동 속도 제한
- TCP 외력 감시: TCP 에 가해지는 최대 외력 제한
- 충돌 감지: 로봇 암에 각 관절에 가해지는 외력 토크 제한
- 운동량 감시: 로봇 암에 가해지는 최대 Momentum 제한
- 기계적 동력 감시: 로봇 암이 낼 수 있는 최대 동력 제한
각 감시 기능이 감지하는 제한치는 설정 메뉴의 안전 변수 탭에서 설정할 수 있습니다. 다음은 하나의 예로 조인트 위치 감시에 사용되는 제한치를 설정하는 화면을 보여줍니다.
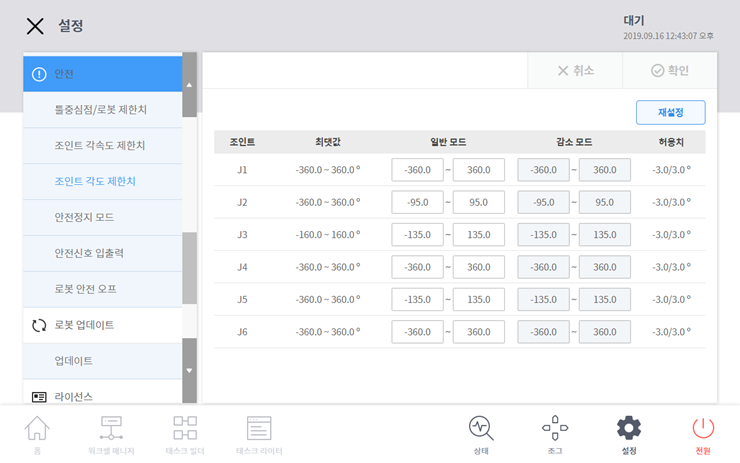
감시 기능에 따른 로봇의 정지 조건은 앞서 소개된 안전 정지 모드 메뉴에서 설정할 수 있습니다.
[따라 해보기]
설정 – 안전 – 툴중심점/로봇 제한치 메뉴에서 충돌감지 항목의 일반 모드 값을 50과 90으로 변경하고 로봇 동작 중 충돌감지 시 민감도 변화를 확인해 보세요.
※ 안전 제한치는 안전정격 감시 기능이 정지를 시작하는 조건입니다. 정지가 완료되었을 때의 위치, 외부에 가해지는 힘은 설정한 안전 제한치와 다를 수 있으니 주의하시기 바랍니다.
4. 안전신호 입출력 기능
두산 로봇은 안전 보호 장치로부터 보호정지 신호, 외부 비상정지 신호 입력, 3 position Enable Switch 등을 연결할 수 있는 안전정격 입출력 인터페이스를 제공합니다.
안전 신호 입출력은 설정 메뉴의 안전 탭에서 설정할 수 있습니다.
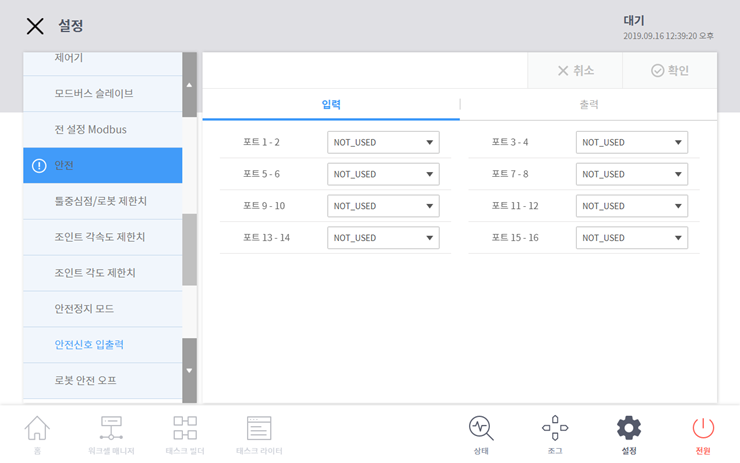
예를 들어, 외부 비상정지 신호에 따라 로봇의 SS2 정지 기능을 사용하거나, 로봇의 작동 상태를 외부 장비로 전달할 수 있습니다.
- 이중화된 인터페이스를 기반으로 입력 신호간의 불일치가 감지되거나 출력 신호에 대한 피드백에서 불일치가 감지되면 로봇을 정지시키고 에러메시지를 표시하게 됩니다. 포트 1-2, 3-4와 같은 조합으로 기능이 정의되는 것이 이중화된 인터페이스 사용의 의미합니다.
각 포트 조합에 대해 다음과 같은 조건을 설정할 수 있습니다.
[안전신호 입력 설정]
- Safe Torque Off: Low일 경우, 모터 전원을 즉시 차단하고 브레이크를 체결하여 로봇을 강제로 정지
- Emergency Stop: Low 일 경우, 안전정지 모드에서 설정한 Emergency Stop의 정지 모드에 따라 정지
- Protective Stop: Low 일 경우, 안전정지 모드에서 설정한 Protective Stop의 정지 모드에 따라 정지
- Reduced Speed: Low 일 경우, 협동 작업 영역이 설정되지 않은 경우 태스크에서 설정한 속도의 20%로 감속, 협동 작업 영역 설정 시 동작 속도 비율이 지정된 경우에는 이 비율로 감속하여 작동
- 3 Pos Enable Switch: 사용자 보호를 위한 작동 허가 장치로서 3 위치 스위치를 연결할 때 사용, High 일 경우, 수동 모드에서 조그 불가능, 정지, 서보 온 불가능
- Handguiding Switch: 사용자 보호를 위한 작동 허가 장치로서 핸드가이딩 스위치를 연결할 때 사용, High 일 경우, 핸드가이딩 불가
- Playback Resume: 자동모드 중 핸드가이딩을 포함한 수동 가이드를 사용한 후 프로그램 실행을 재개할 때 사용, High 일 경우, 자동 모드 프로그램 실행 재개
- Protective Stop & Auto Resume: 안전 매트 등의 안전 장비들과 연동하여 사용, High 일 경우, 안전 입력 신호에 의해 Protective Stop 상태가 되었을 경우 티치 펜던트를 이용해 프로그램을 재시작하지 않아도 자동으로 프로그램을 재시작
- Dynamic Zone Enable: 충돌 임시 무효 영역을 동적으로 활성화시킬 때 사용, High 일 경우, 충돌 임시 무효 영역 설정 시 안전 입력을 등록했을 경우 충돌 임시 무효 영역을 활성화
[안전신호 출력 설정]
- Emergency Stop: 비상 정지 버튼 누름, 외부 비상 정지 버튼 누름, 자가 진단 이상이 감지되었을 때 외부 시스템에 비상 정지가 필요한 상황임을 알리기 위해 사용, Low 일 경우, 비상 정지 필요
- Safe Torque Off: Low 일 경우, 로봇이 STO 상태
- Safe Operating Stop: Low 일 경우, 로봇이 SOS 상태
- Safe Stop Event: Low 일 경우, 안전 정지상황 발생
- Normal Speed: Low 일 경우, 로봇이 태스크 프로그램에서 설정한 정상 속도로 작동 중
- Reduced Speed: Low 일 경우, 로봇이 협동 작업 영역에 위치하거나, 외부 감속 모드 신호 입력에 의해 감속 작동 중
- Auto Mode: Low 일 경우, 로봇의 현재 상태가 자동 모드
- Manual Mode: Low 일 경우, 로봇의 현재 상태가 수동 모드
- Standalone Workspace: Low 일 경우, 로봇의 TCP가 단독 작업 영역에 위치해 있음
- Collaborative Workspace: Low 일 경우, 로봇의 TCP가 협동 작업 영역에 위치해 있음
- Collision Detection Overriding Zone: Low 일 경우, 로봇의 TCP가 충돌 감지 별도 지정 영역에 위치해 있음
- Tool Orientation Monitoring Zone: Low 일 경우, 로봇의 TCP가 공구 방향 유지 감시 영역에 위치해 있음
[따라 해보기]
외부 비상정지 버튼을 준비하여 포트 1-2에 연결하고 로봇 작동 중 비상정지 모드가 발생하는 것을 확인해 보세요. 외부 비상정지 버튼을 이용한 비상정지 모드는 High가 정상상태이며, Low가 비상정지 조건입니다.
5. 정리
이번 과정에서는 두산 로봇에서 제공되는 안전기능에 대해서 알아봤습니다. 안전 정지 및 감시 기능은 안전 조건에 따른 로봇의 정지 모드를 다양하게 설정할 수 있습니다. 안전신호 입출력은 로봇이 외부 시스템과 연동되어 사용될 때, 로봇을 상태를 변경하거나 모니터링 할 수 있게 해줍니다. 보다 상세한 내용은 로봇 설치 및 사용자 매뉴얼을 참고하시기 바랍니다.
참고 자료
- 산업용 로봇 표준안전규격, ISO 10218-1 & 2
- 협동로봇 국제안전규격, ISO/TS 15066
- 두산로보틱스 설치 & 사용자 매뉴얼, https://robotlab.doosanrobotics.com
※ 본 자료의 모든 내용과 도안에 대한 저작권 및 지적재산권은 두산로보틱스에 있습니다. 따라서 두산로보틱스의 서면 허가 없이 사용, 복사, 유포하는 어떠한 행위도 금지됩니다. 또한 특허권을 오용하거나 변용하는데 따르는 책임은 전적으로 사용자에게 있습니다.
추천 교육
여러분에게 도움이 될 수 있는 추천 교육 과정들을 확인하세요.
문서
힘 제어를 이용한 프로그래밍 방법
문서
무선 공유기 사용방법
문서
DART-Studio 사용 방법 – 태스크 관리