Log In
튜토리얼
문서
스마트 셋업(자동 측정 기능) 사용 방법
기초
30 분
이 과정에서는 두산 로봇에서 제공하는 자동 측정 기능인 스마트 셋업의 사용 방법을 소개합니다.
1. 시작하기
두산 로봇은 로봇의 설치 경사각과 툴의 무게 및 끝단 위치 등을 자동으로 측정하는 스마트 셋업(Smart Setup) 기능이 탑재되어 있어 로봇 설치 및 변경을 빠르고 쉽게 할 수 있습니다.
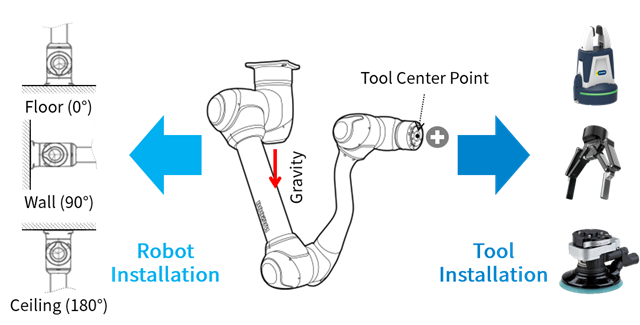
각 축에 장착된 정밀한 조인트 토크 센서(Joint Torque Sensor, JTS)를 기반으로 한 제어 기능은 업계 최고 수준의 충돌 민감도를 제공할 뿐만 아니라, 로봇 스스로 설치된 경사각과 툴의 무게를 측정할 수 있습니다.
그리고 로봇 끝단에 장착된 툴의 자세를 효과적으로 조작하기 위해 꼭 필요한 툴 좌표계 지정을 위한 툴 중심 위치(Tool Center Point, TCP)를 4번의 위치 교시로 자동으로 계산해 줍니다.
이 과정에서는 두산로봇에서 제공하는 스마트 셋업을 사용하는 방법을 알아보겠습니다.
2. 자동으로 로봇 설치 자세 측정하기
두산 로봇은 어느 각도로도 설치가 가능합니다. 그래서 설치된 각도에 맞춰 직접교시, 힘/순응 제어 등 고급 제어 기능들을 사용하기 위해, 로봇이 설치된 각도를 정확히 설정해야 합니다.
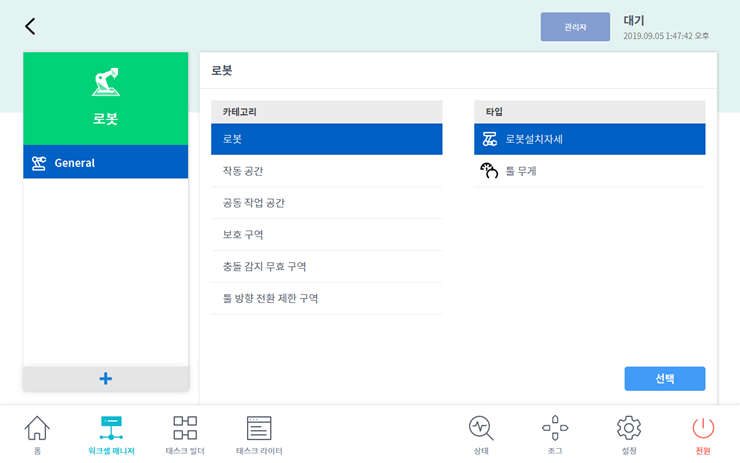
워크셀 매니저의 로봇 카테고리에서 로봇 설치 자세를 선택하세요.
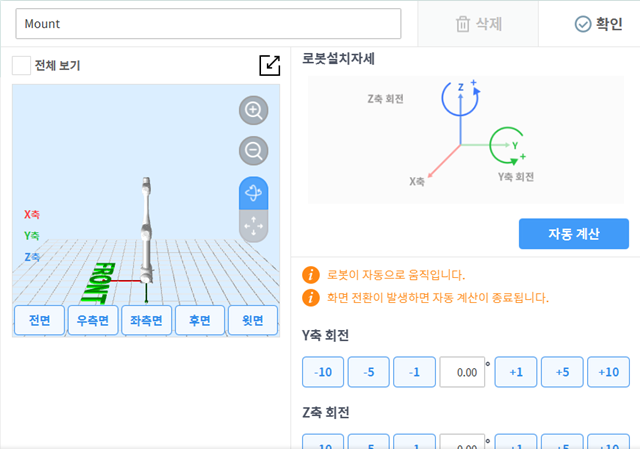
로봇 설치 자세 화면에서 자동 계산 버튼만으로 로봇이 설치된 각도를 자동으로 측정할 수 있습니다. 측정된 각도는 Y축과 Z축으로 환산이 되어 자동으로 입력이 됩니다.
- 로봇의 설치 각도를 사용자가 직접 입력할 수도 있습니다.
※ 자동 계산 사용 시 주의 사항은 다음과 같습니다.
- 자동 계산 실행 전에 주변에 장애물을 모두 제거하세요.
- 자동 계산 중에는 안전 감시 기능이 무효화되니 주의하세요.
자동 계산 실행 중에는 자동 계산 버튼이 정지 버튼으로 변경되며, 정지하고자 할 경우 이 버튼을 눌러주세요.
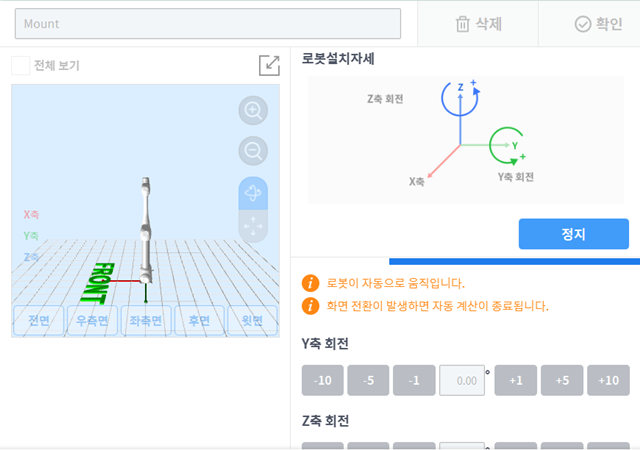
※ 자동 측정 기능은 중지 후 다시 측정할 경우 초기 시작 위치에서부터 로봇이 동작을 하므로 시작 시 사용자 및 로봇의 안전에 주의하시기 바랍니다.
[따라 해보기]
로봇을 사용하고자 하는 장소에 설치하고, 로봇 설치 자세 자동 측정으로 설치된 각도를 측정해 보세요.
3. 자동으로 툴 무게/무게중심 측정하기
두산 로봇의 직접교시, 힘/순응제어 등 고급 제어를 효과적으로 사용하기 위해서는 로봇과 함께 사용되는 툴의 무게 및 무게 중심을 정확히 입력해주어야 합니다.
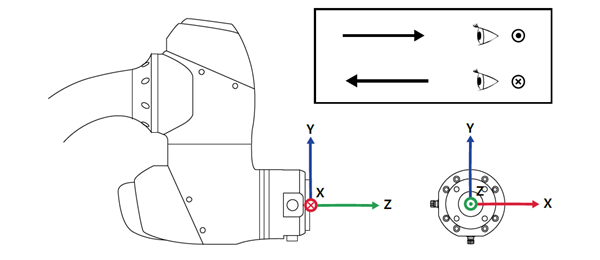
두산 로봇의 기본 TCP의 위치는 아래 그림을 참고하세요.
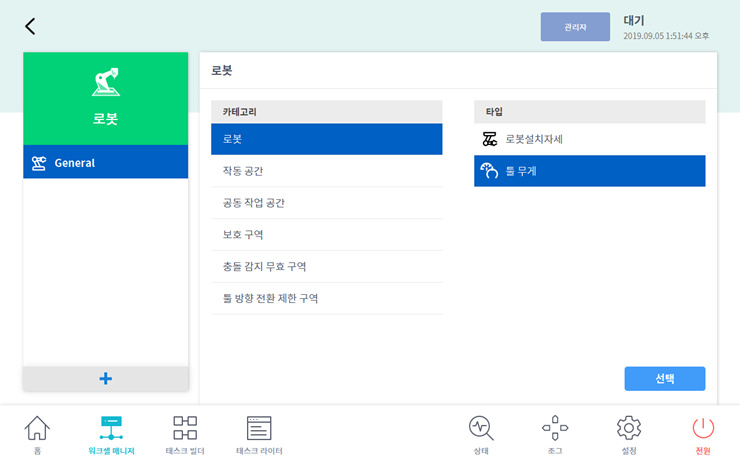
두산 로봇은 로봇 툴 플렌지에 장착된 툴의 무게를 스스로 측정할 수 있는 툴 무게 측정 기능을 제공합니다. 워크셀 매니저의 로봇 카테고리에서 툴 무게를 선택하세요.
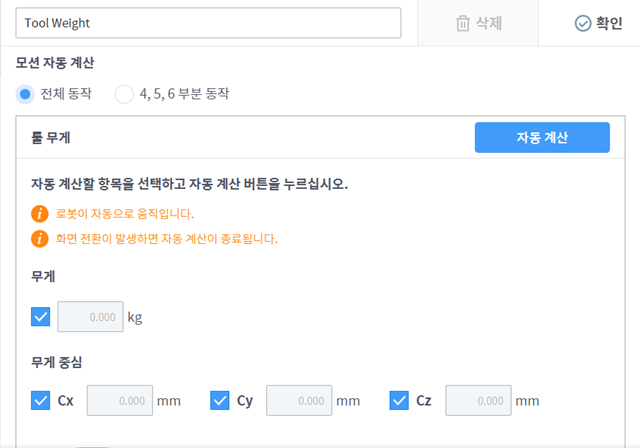
툴 무게의 설정 화면에서 자동 계산 버튼만으로 툴의 무게를 손쉽게 측정할 수 있습니다.
- 모션 자동 계산 방식은 로봇의 6축을 모두 사용하는 전체동작과 4, 5, 6축만을 사용하는 부분 동작 중 원하는 방식을 선택할 수 있습니다.
- 자동 계산이 가능한 항목은 무게와 무게 중심이며, 사용자는 필요한 항목만을 선택해서 자동 계산을 측정할 수 있습니다.
※ 자동 계산 사용 시 주의 사항은 다음과 같습니다.
- 자동 계산 실행 전에 주변에 장애물을 모두 제거하세요.
- 자동 계산 중에는 안전 감시 기능이 무효화되니 주의하세요.
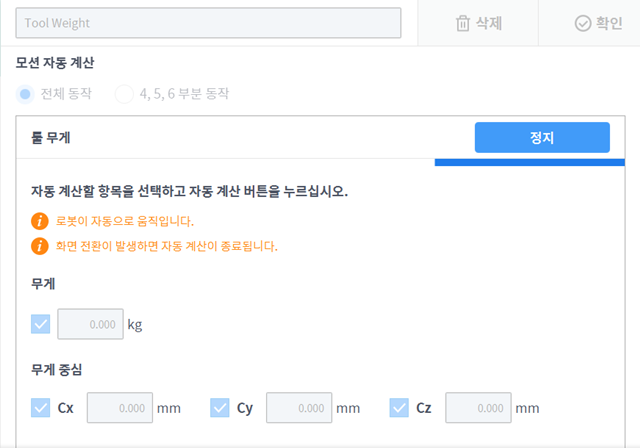
자동 계산 실행 중에는 자동 계산 버튼이 정지 버튼으로 변경되며, 정지하고자 할 경우 이 버튼을 눌러주세요. 이 경우 무게 및 무게 중심의 값은 초기화 됩니다.
※ 자동 측정 기능은 중지 후 다시 측정할 경우 초기 시작 위치에서부터 로봇이 동작을 하므로 시작 시 사용자 및 로봇의 안전에 주의하시기 바랍니다.
[따라 해보기]
로봇의 툴 플렌지에 사용하고자 하는 툴(그리퍼, 전동공구 등)을 설치하고, 툴 무게 자동 측정으로 무게를 측정해 보세요.
4. 자동으로 TCP 계산하기
로봇 끝단에 장착된 툴의 자세를 효과적으로 조작하기 위해서는 툴 중심 위치(TCP)를 정확히 입력해야 합니다. TCP는 플랜지 좌표계를 기준으로 위치와 회전각이 함께 정의되어야 합니다.
워크셀 매니저에서 엔드이펙터로 등록된 워크셀 아이템에서 툴 중심 위치 설정 탭을 선택하세요.

자동 계산 토글 스위치를 탭 하세요.
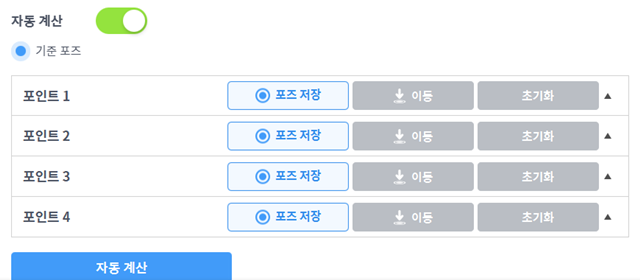
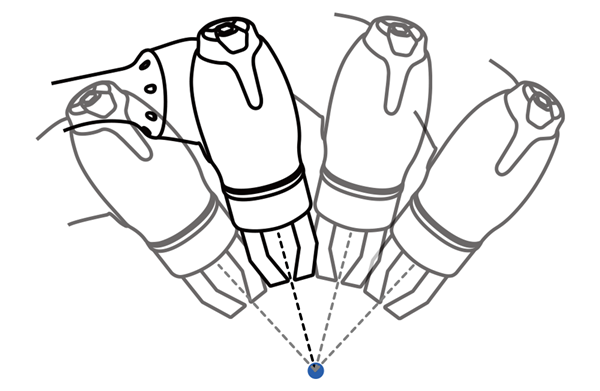
그리고 툴의 중심점이 될 위치를 정하고, 기준이 될 위치를 정하고 툴의 중심점이 일정하게 유지되도록 하며 포즈 저장 버튼을 이용해서 4개의 위치를 입력하세요. 4개의 위치를 입력하는 방법은 아래의 그림을 참고하시기 바랍니다.
저장이 될 때마다 해당 위치에 대해 상세 좌표 정보를 확인할 수 있습니다.

4개의 위치를 입력하고, 자동 계산 버튼을 탭 하면 상단의 위치 정보 영역에 결과값이 업데이트 됩니다.

- 4개의 포인트에 아무런 값을 입력하지 않고 자동 계산 버튼을 탭 하면, 모든 값이 0으로 보여집니다.
- 자동 계산은 X, Y, Z 위치만 해당되므로 회전각은 사용자가 직접 입력해야 합니다. 회전각은 A, B, C의 세 가지 항목으로 지정할 수 있으며 이는 ‘오일러 Z-Y-Z (Euler Z-Y-Z angles)’ 회전 방법을 따릅니다. 보다 상세한 사용 방법은 사용자 매뉴얼을 참고하시기 바랍니다.
[따라 해보기]
로봇의 툴 플렌지에 사용하고자 하는 툴(그리퍼, 전동공구 등)을 설치하고, TCP 자동 계산 기능을 이용하여 해당 툴의 TCP를 계산하고, 직접교시나 조깅을 통해 TCP를 기준으로 조작해 보세요.
5. 정리
이번 과정에서는 두산 로봇에서 제공하는 스마트 셋업을 통해 로봇 설치 자세, 툴 무게 중심, 툴 중심 위치를 쉽게 설정할 수 있는 자동 기능들을 알아봤습니다. 현장에서 직접 로봇의 자세나 툴의 무게를 측정할 수도 있지만, 소개된 스마트 셋업을 이용해서 빠르고 손쉽게 자동화 시스템을 구성하시기 바랍니다. 보다 상세한 내용은 사용자 매뉴얼을 참조하시기 바랍니다.
참고 자료
- 두산로보틱스 사용자 매뉴얼, https://robotlab.doosanrobotics.com
※ 본 자료의 모든 내용과 도안에 대한 저작권 및 지적재산권은 두산로보틱스에 있습니다. 따라서 두산로보틱스의 서면 허가 없이 사용, 복사 및 유포하는 어떠한 행위도 금지됩니다. 또한, 특허권을 오용하거나 변용하는데 따르는 책임은 전적으로 사용자에게 있습니다.
추천 교육
여러분에게 도움이 될 수 있는 추천 교육 과정들을 확인하세요.
문서
힘 제어를 이용한 프로그래밍 방법
문서
무선 공유기 사용방법
문서
DART-Studio 사용 방법 – 태스크 관리